副井提升机自动控制技术的研究与应用
笔者对副井提升机“一键式操作、电梯式运行”的关键控制环节进行了研究与应用,以满足现代企业宏观上“自动、智能”的设备诉求,微观上“安全稳定、高效低耗”的无人化生产需求。
1 研究思路
1.1 传统操作流程
目前国内矿山大部分副井提升机提升作业的操作流程如下。
(1)人员提升过程 人工叫罐后,信号工发出信号,通知提升机司机操作罐笼到达叫罐水平,罐笼到位后,信号工操作操车系统下放遥台,打开安全门,乘罐人员手动提放罐帘门后进出罐笼。安全确认环节均由信号工负责。
(2)矿车提升过程 人工叫罐后,信号工发出信号,通知提升机司机操作罐笼到达叫罐水平,罐笼到位后,信号工操作操车系统下放遥台,打开安全门,操作工手动提放罐帘门后,推拉小矿车进出罐笼。安全确认环节均由信号工负责。
1.2 智能控制方案
与传统的副井提升机运行模式相比,笔者提出了人员、矿车从叫罐、候罐、入罐、提升到出罐的“一键式操作、电梯式运行”的智能控制方案。
(1)操作“一键式” 系统可一键启动,提升机系统设备一体化联动运转。研发了罐笼内外机电一体化机械传动机构,隔空驱动罐内阻车器和卷帘门,实现了罐内阻车器解锁与卷帘门开闭动作的自动化。
(2)运行“电梯式” 提升过程中,可自动安检防护、自动操车、自动发送信号、智能搜寻目标水平,达到电梯式运行。利用推拉机的自动推拉机头及其辅助机头升降钩爪装置,实现了罐笼装卸矿车过程的机械自动化。
(3)监控 N+1 式 监控高度集中,无需信号工和操作司机,在指挥中心设 1 名司机集中巡视,并监控 3 套副井提升系统的运行。研发了智能安全监测机器人系统,虚拟应用罐笼速度与位置编码技术智能搜寻目标水平,配装了全自动化的提升运行控制软硬件设备系统。
通过以上措施,可实现副井提升机“一键式操作、电梯式运行”的目标。
2 核心技术方案
要实现副井提升机运行模式的智能化,需要减少操作流程中的人工环节,同时解决副井提升机自动选择罐笼停靠水平的难题。
2.1 操作“一键式”
“一键式”操作即让各层作业人员可以像操作电梯一样,按键叫罐后,在候罐区选择到达平台,人员及设备的装卸作业均由提升机自动运行实现。在此过程中,罐帘门的升降以及安全门的开闭均自动实现,动作前的每一个环节,由安全监测机器人自动辨别确认。
2.1.1 罐帘门自动升降装置
罐帘门自动升降是提升机自动运行的一个关键环节,为此研发了外置动力自动罐帘装置。该装置主要由液压推杆装置、动钩配重装置、钩爪车组、曲轨、导向轮组等组成,如图 1 所示。
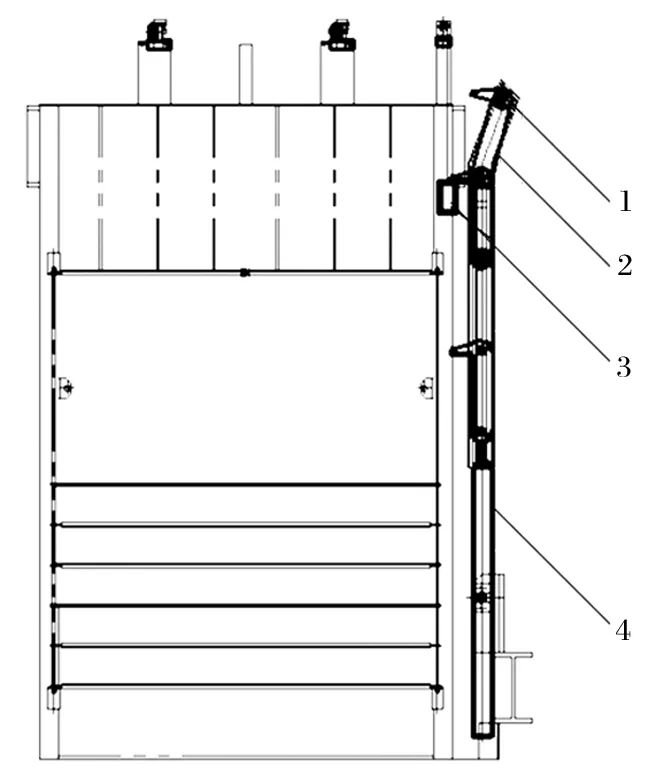
1.曲轨 2.钩爪组件 3.动钩配重装置 4.液压推杆装置
图1 自动罐帘装置示意
罐帘门开启时,通过外置液压推杆驱动钩爪车组,使动钩配重装置下行;罐帘门下放时,通过外置液压推杆驱动钩爪车组上行,使罐帘门靠重力自动下放。该方式解决了人工挑挂开启、摘钩放落罐帘门的问题,实现了隔空动力卷升、重力下放罐帘。
2.1.2 罐笼自动装卸
目前,矿车出入罐依靠人力推拉,作业效率低,现场工作环境差。运用机械传动技术,笔者研发了推车机机头自动抓爪装置。该装置主要由推拉机头推车及拉车,实现矿车自动进出罐笼;同时外置液压机械触手装置,可自动打开管内阻车器。
在推车入罐以及拉车卸罐时,借助激光扫描装置辅助监测判别运矿车的位置和运行区域的安全。主要操作过程为:①将激光扫描仪初始化,识别矿车正常停车区域,然后记忆;② 罐笼装车时,启动车厢激光扫描仪对罐笼内环境进行杂物扫描分析,确认无杂物后,控制推拉机运行至待装小车位,推动小车入罐行走,当触及阻车器锁车装置时,阻车器锁车,待系统确认小车停车位置正确、锁车抓爪锁车到位后,控制推拉机反向归位停车待命,然后向提升控制系统发送提升运行信号,提升系统开始提升,罐笼装车流程结束;③罐笼卸车时,控制系统停车到位后,控制推拉机向罐笼方向移动行走,当触及阻车器解锁装置时,停止行走,机头自动闭合抓住小车,同时阻车器自动解锁,待系统确认阻车器解锁完毕后,控制推拉机反向行走至预定小车停车位,并张开机头放下小车,返回至预定停机位待命;④ 启动激光扫描仪对车厢内环境进行扫描检查,确认无杂物后,向提升控制系统发送提升运行信号,提升系统开始提升,罐笼卸车流程结束。自动抓爪装置如图 2 所示。
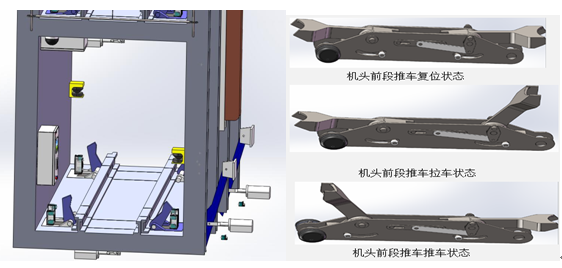
图2 自动抓爪装置示意
2.1.3 罐笼定点充电装置
因运行需要,全自动副井提升机罐笼内安装有电控箱、照明灯具、检测传感器、激光扫描仪、摄像机、对讲机等多种监控通信设备,耗电量比较大。若采用更换电池的方式供电,因电池容量较大、本体较重,更换时费时费力,且电池更换过程影响提升机运行,既不科学,又不经济。基于提高调速质量和节能的目的,研发了自适应滑接供受电装置,如图 3 所示,定点向罐笼内供电电源补充电能。罐笼行驶到充电点位后,充电滑触板和受电滑触板紧密接触,自动充电。充电控制系统设有防过充保护,当电能存储器充电达到总电量的 95% 时,自动断电。
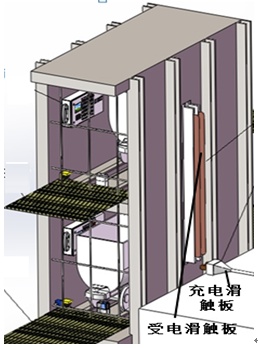
图3 定点充电装置示意
2.2 运行“电梯式”的实现
“电梯式”运行是指提升机可以像电梯一样,通过安全智能监控实现全自动运行,并实现了以下功能:
(1)提升机运行操作具备唯一性,实现了上位集中监控与驾驶台操作互切互锁功能;
(2)提升机操控系统、操车控制系统以及罐笼设备间通过通信实现了互联互通,具备了联动控制功能;
(3)为安全门、罐帘门、摇台操作以及罐笼选层设置了安全检测装置,具备了动作状态冗余检测功能,进一步提升运行安全;
(4)研发了安全检测机器人系统,具备现场安全检查确认和信号自动发送功能;
(5)搭建了视频监控、通信、语音播报、声光预警、应急呼叫处置等安全辅助功能;
(6)各水平井口操作箱设置了提升机手动闭锁开关,防止在运行过程中误启、误动。
以上述 6 项功能为基础,采用目标水平智能寻址,实现了提升罐笼自动寻找泊位。其主要原理是:①预先为井筒内各水平井口设定一个物理地址,按照罐笼提升钢丝绳行进长度与各水平井口标高的对应关系,设定各水平井口对应提升钢丝绳行进长度的软地址,建立系统目标地址核算的参变量;② 在井筒内各水平井口安装罐笼位置检测开关,检测罐笼到达与通过信号,为系统反馈罐笼当前物理位置地址,建立目标地址核算的核对参照点;③在提升机导向轮安装速度编码器,实时检测导向轮转速,为系统自动计算罐笼提升钢丝绳的行进长度,获取罐笼当前井口位置提供核算数据;④ 现场操作箱设有目标位置选择按键,用于键入提升目标水平井口物理地址。
提升罐笼自动寻址系统可确定罐笼与井筒各水平的相对位置,自动控制罐笼停靠到位,实现自动选层,如图 4 所示。该系统由副井提升罐笼自动寻址主机 XZ、井筒各水平井口现场选层键盘 DXn、罐笼位置传感器 DJn、滚筒转速检测编码器 B 及其信号采集通信装置组成。DXn 键入目标地址数据,DJn 检测滚筒转速并反馈罐笼当前位置地址数据,B 检测反馈罐笼当前位置软地址,各种检测数据通过光纤输入到 XZ内,XZ 计算、核对、查找确定目标地址,然后向副井提升机控制系统发送罐笼到位停机信号。
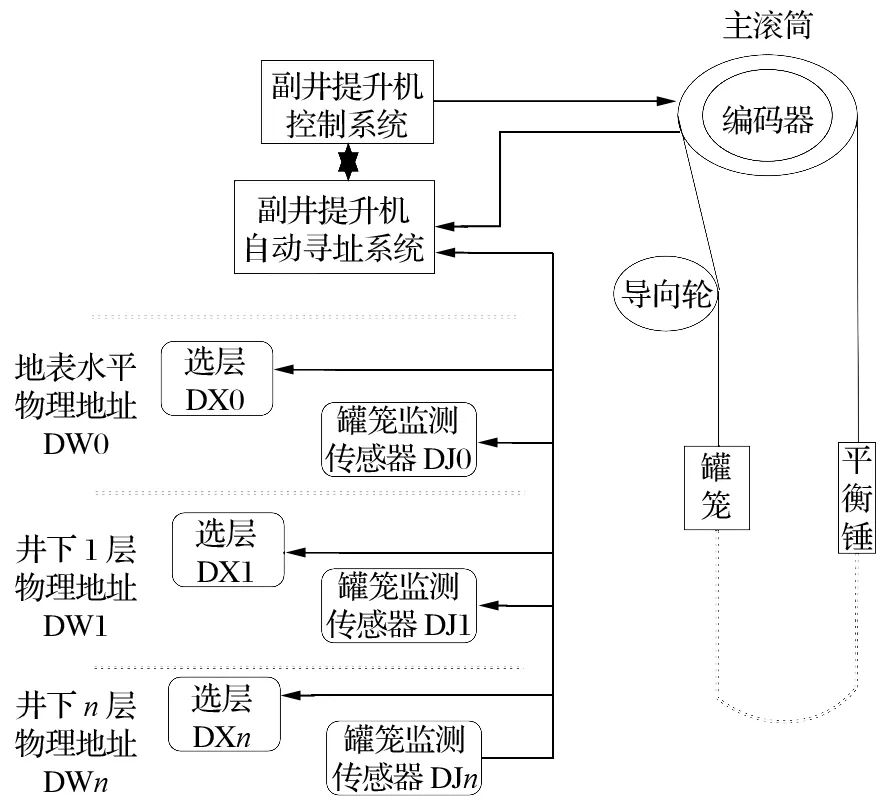
图4 自动寻停系统示意
2.3 智能监控的实现方法
2.3.1 智能安全监测机器人系统
安全监测机器人将各种安全监测装置系统化,通过逻辑程序,赋予系统安全确认的职能,从而代替信号工。该系统包含以下功能模块。
(1)IC 卡人员自动识别装置 为现场启动按键加上识别锁,甄别操作人员的操作资质,通过设定操作权限,杜绝非资质人员的操作隐患。
(2)闭锁控制软件 利用激光扫描仪、无线通信设备和智能判断分析软件,组成区域环境自动扫描检测系统,在确认环境检测安全、设备状态正常后,闭锁控制软件自动发送提升信号,取消了信号工联系确认环节。
(3)红外光幕防闯入装置 井口候罐区域设置红外光幕装置,执行警示防控职责。利用光电检测传感器、闪烁光栅警示器和监控软件,组成提升安全区间警示门禁系统,为现场人员提供光幕警戒信号,为提升机控制系统提供播报警告和驱离音响信号,在提升运行过程中人员闯入可声光、语音报警。
(4)激光扫描检测装置 这是人员和矿车出入罐笼前安全监测的核心设备,可自动检测罐笼内外操作区域有无杂物、人员,是开闭罐帘门和安全门、升降摇台的安全前提条件。
(5)磁电传感装置 冗余设置,利用非接触式电磁检测传感器、光电传感器与分析软件,组成设备动作状态检测确认系统,自动检查确认摇台、安全门、罐帘门、阻车器状态,避免引发设备故障,同时将设备状态反馈给系统软件。
智能安全监测机器人系统的主要原理是:利用身份识别、激光扫描仪、电磁检测、警示光栅门禁、无线通信和 PLC 控制技术,自动防控非资质人员的误操作,智能监控提升运行区间和操车设备动作区域的安全,自动检查确认操车设备动作状态,使副井提升运行实现系统自动安全检查确认。
2.3.2 “N+1”监控模式
针对“一键式操作、电梯式运行”控制系统高度集中和自动化的特点,制定了“N+1”式提升运行监控模式,其中 N 代表信号工数量,1 代表 1 名提升机监控司机,N 取 3 或 0。
(1)3+1 模式 马城铁矿共 3 条副井,设置 3名信号工与 1 名监控司机,协同监控或操作 3 条副井提升机的运行。信号工在井口远程音、视频现场监管,手动操车和发送信号。监控司机在集控室巡视监控或操作 3 台副井提升机运行,处理应急事件。
(2)0+1 模式 信号工由安监机器人取代,只有 1 名监控司机,乘员或其他资质提升操作人员利用现场操作装置叫罐、启动提升系统。监控司机在集控室巡视监控 3 条副井提升机的运行,处理应急事件。
结合生产实际,综合 2 种模式的特点,在正常生产提升时,采用“0+1”模式;在提运大型设备或系统检修等特殊作业时,采用“3+1”模式。
3 应用效果
通过提升机“一键式操作、电梯式运行”智能运行模式,解决了制约副井提升机自动运行的多个关键问题,提升了副井提升机运行自动化程度,实现了减员增效,表 1 所列为传统模式与智能模式操控人员的对比情况。由表 1 可以看出,较传统模式,智能模式通过增加全自动运行功能,大幅度减少了操控人员,3 条副井可以节省司机、信号工 133 名,按照人均工资 8 万元/a 计算,每年节省费用 1 064 万元。
表1 2 种模式人员配置对比

2019 年 12 月,马城铁矿 1 号副井提升机按照“一键式操作、电梯式运行”控制系统集成装配完毕,并进行了安装测试。通过模拟提升作业过程,系统不但具备“一键式操作、电梯式运行”效能特征,而且安全、稳定,完全达到了实用技术要求,每项应用技术的功效性能均达到了安全稳定、动作精准的目标要求。
4 结语
副井提升机“一键式操作、电梯式运行”模式,解决了传统副井提升机存在的提升效率低、人力资源占用多、成本高的现实问题,解脱了人力辅助拉卸罐载运矿车时的高强度劳动,规避了人力作业、人为误操作的安全风险,提高了副井提升机的运行效能。以“国内领先,国际先进”的智能地采矿山为建设目标,满足了降本增效竞争机制下的安全稳定、高效低耗设备的诉求,并使国家安监总局推进的“副井提升机机器人替代工程”得到了落实。


